 |  |  |
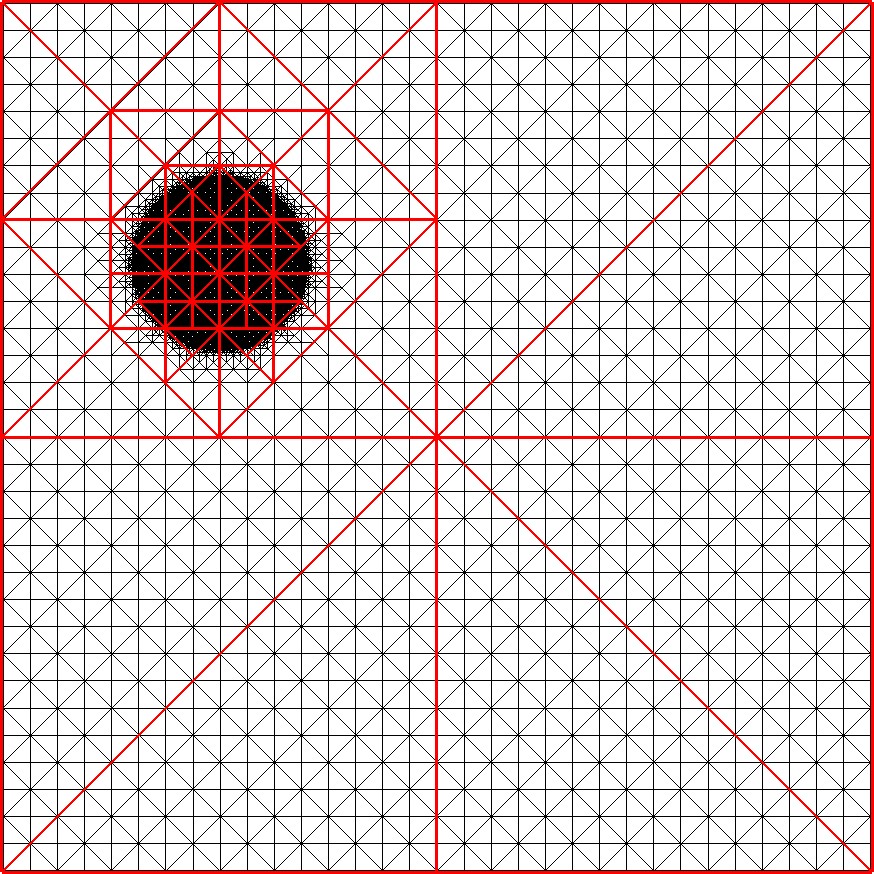 | 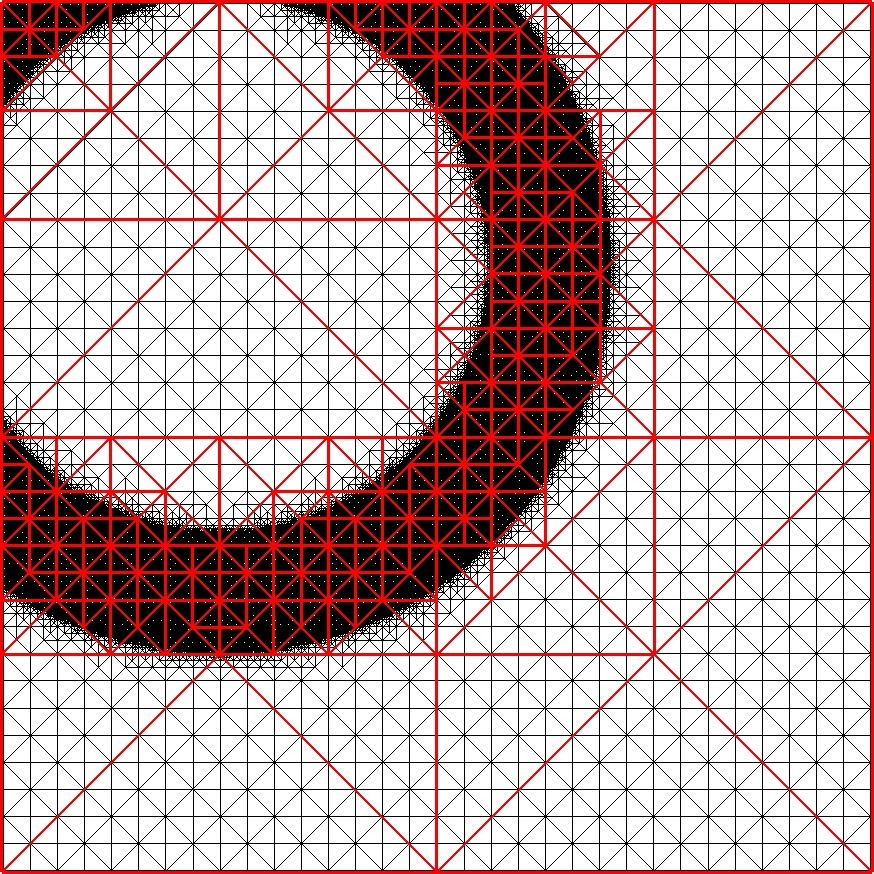 | 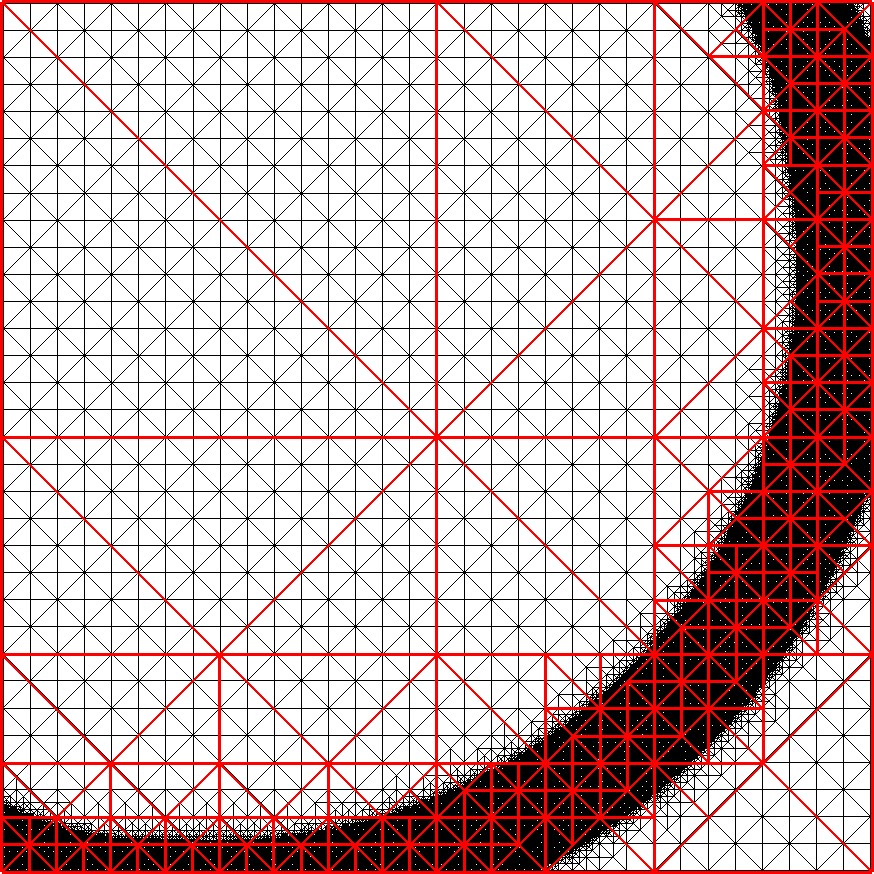 |
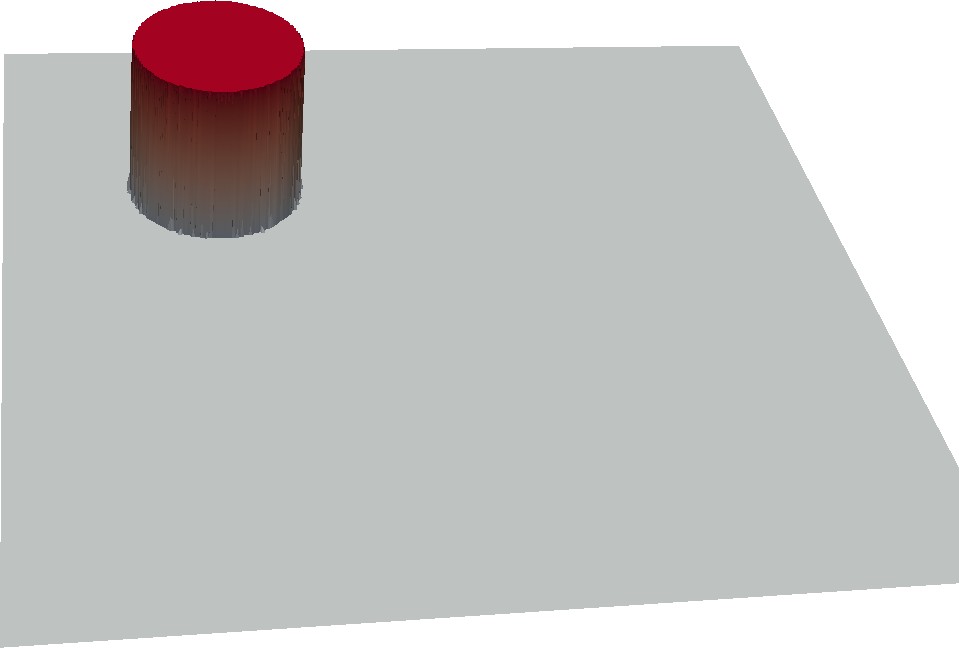
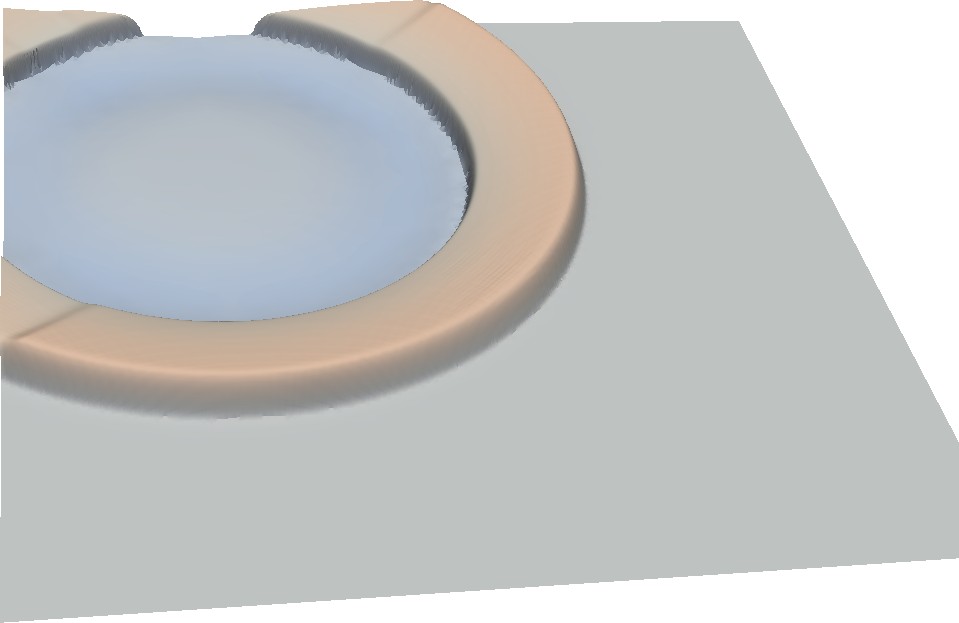
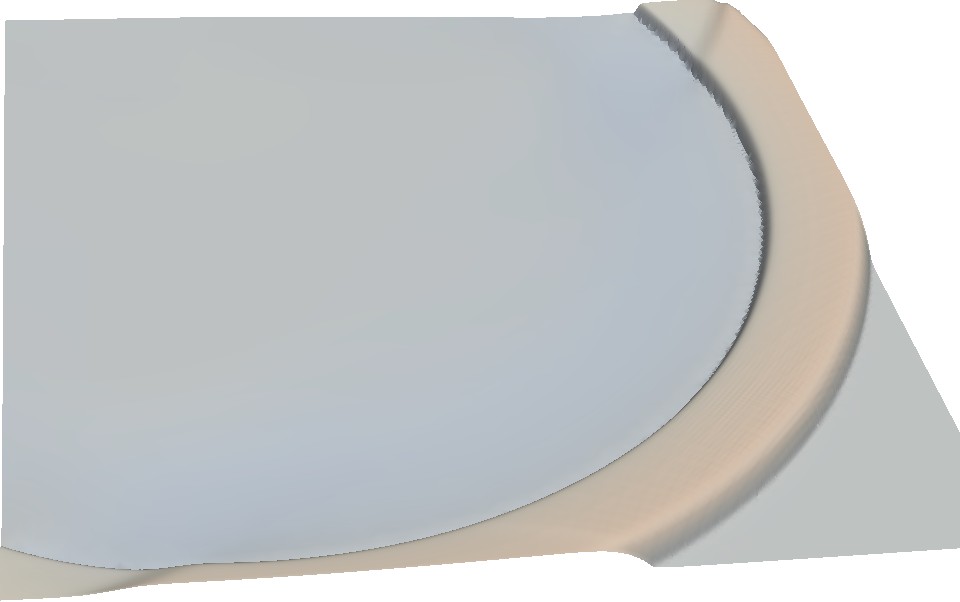
Figure 5.21: Visualization of three different time steps for a representative radial dam break
test scenario. A radial dam break is used for most of the benchmarks in this section [SWB13a].
| | | |
| | | |
We conducted several benchmarks with the test platforms further denoted as Intel and AMD. All computations are done in single precision. A sketch of a shallow water benchmark which is simulating a radial dam break is given in Fig. 5.21. Detailed information on both systems is given in Appendix A.2.
The first benchmark scenario is given by a flat sea-ground 300 meters below the sea surface and a domain length of 5 km. We use up to 8 levels of refinements and allow the refinement/coarsening triggered according to the surface above/below 300.02/300.01 meter. Our domain is set up by two triangles forming a square centered at the origin. The initial refinement depth is given by d, resulting in 2d+1 coarse triangles without adaptivity. The dam is placed with its center at (-1250m,1000m) with a radius of 250m. The positive water displacement is set to 1m. Performance results are given in “Million Cells Per Second” (MCPS) that can be computed.
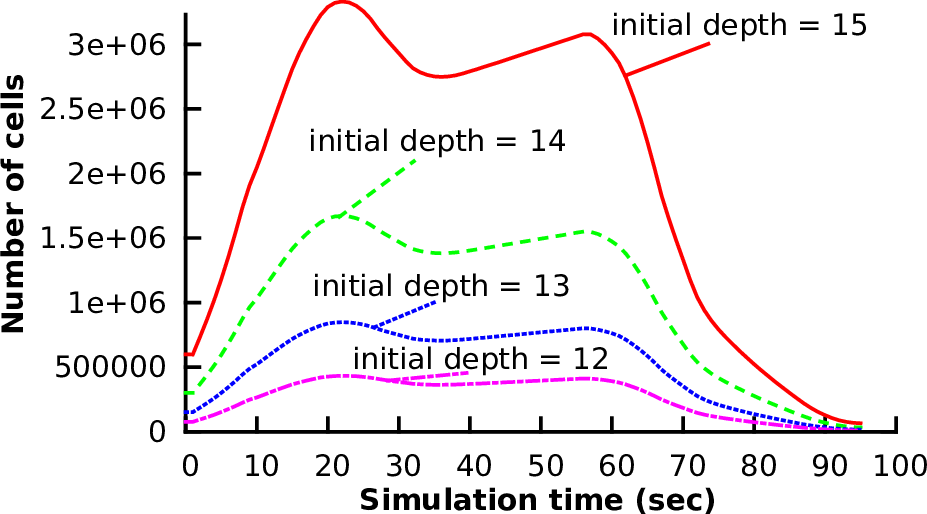
The dynamically changing number of cells over the entire simulation is given in Fig. 5.22. A visualization of a similar scenario with an initial radial dam break is given in Fig. 5.21.
With the threshold-based cluster generation approach (see Sec. 5.6.2), we expect overheads introduced depending on the number of clusters (i.e. on the maximum number of cells in each cluster). The following benchmark is based on a regular and non-adaptive grid. We tested different initial refinement depths d, each depth resulting in a grid with 2d+1 cells. The simulation is based on 1st-order spatial- and time-discretization of the shallow water equations.
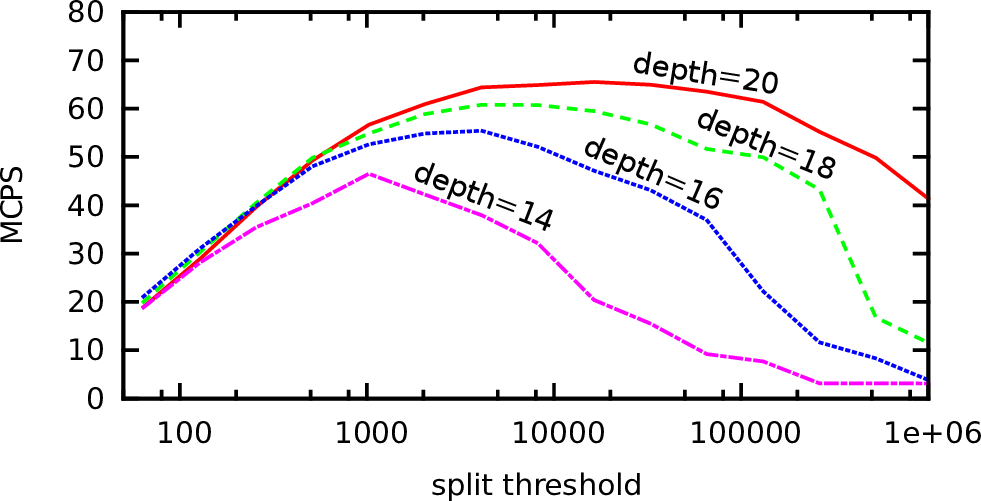
The results in Fig. 5.23 show the dependency of the efficiency on the cluster split threshold. We account for these performance increases and decreases with tasking overheads, synchronization requirements and load imbalances. These aspects are further described and performance increase and decrease is depicted with ↑ and ↓, respectively, in the following table:
| Smaller thresholds | Larger thresholds |
|
| Tasking overhead | ↓ Smaller thresholds lead to more clusters, therefore more overheads for starting tasks. | ↑ With larger thresholds, less clusters are created, thus reducing the overhead related to the number of tasks. |
| Replicated interfaces | ↓ More clusters lead to more replicated interfaces and thus to more reduction operations. | ↑ For larger thresholds, less additional reduction operations are required. |
| Load imbalances | ↑ Smaller clusters increase the potential of improving the load balancing. | ↓ For larger thresholds, the potential of load imbalance is increased. |
Thus, the optimal performance depends on the problem size, the number of cores and the splitting of the clusters.
We continue with a more detailed analysis of the overheads introduced by threading and, if not otherwise mentioned, fix the split threshold size to Ts := 32768, i.e. the number of clusters is kept constant. Several benchmark settings were used:
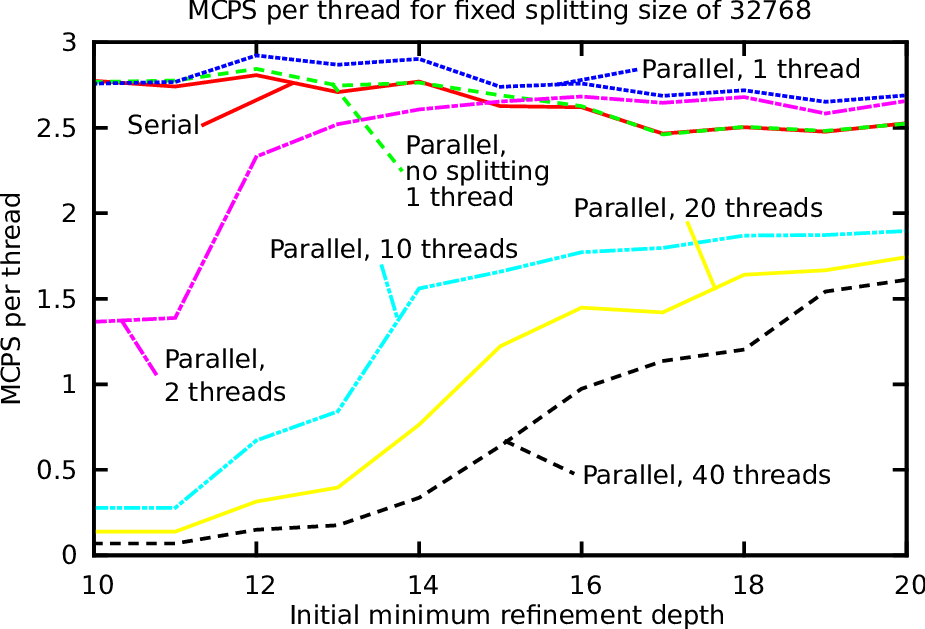
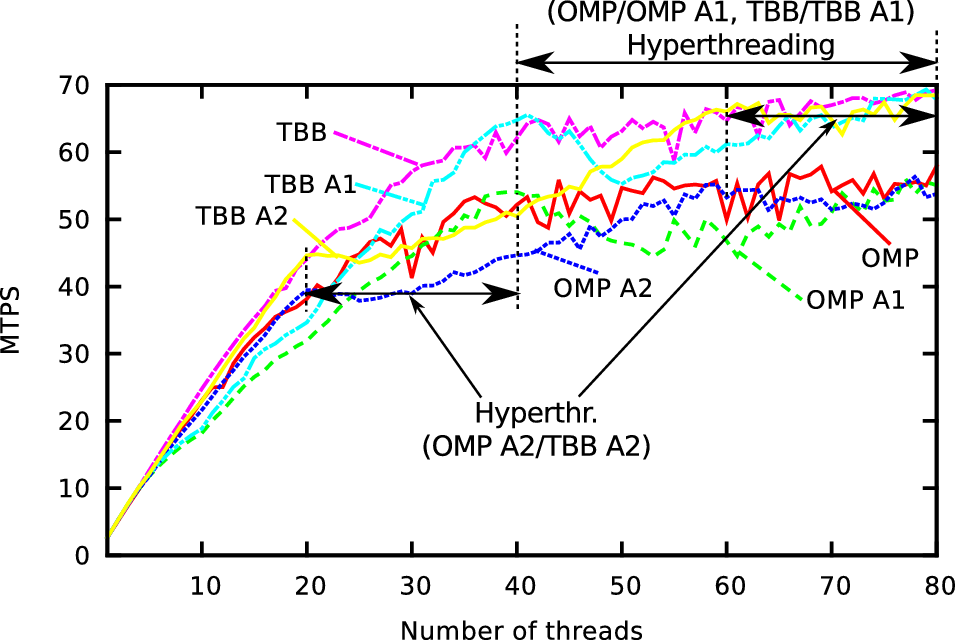
The threads are pinned to non-hyperthreaded cores in a compact way. A simulation domain set up by a single base triangle with a typical radial dam break scenario was used. The maximum refinement depth was set to 8 and 100 simulated seconds were computed. The results, based on the million processed cells per second divided by the number of threads, are given in Fig. 5.24. The benchmarks were conducted on the platform Intel and we discuss the benchmark data in the order of the test runs.
We account for this improved performance with a cache-blocking effect: Our clustering splits the domain into independent chunks with a size of equal or less than 215 = 32768. This generates clusters with a size also fitting at least into the last-level cache. To account for the temporal data reaccesses which is required for such a cache effect, we reconsider our stack access strategies between traversals:
(a) In the edge-based communication scheme used in this implementation, we pushed the flux DoF stored on both edges to a buffer and computed the fluxes after the cluster’s grid was traversed. Thus, the DoF stored on this buffer can still be available in cache and accessed with less latency.
(b) Regarding the adaptivity traversals, we only use the structure and adaptivity stack as input. In our implementation, we only access 2 bytes on the structure and 1 byte for the adaptivity state stack for each traversed cell during the traversals generating a conforming grid. This perfectly fits into a higher cache level. By atomically executing the forward traversal directly after a backward traversal in one operation executed on the cluster, the structure and adaptivity information is still kept in a higher cache level and thus does not have to be written back to main memory.
For higher number of threads (10, 20 and 40), no further improvements due to cache-blocking could be gained for the considered problem sizes. Simulations and the scalability with a larger number of threads are discussed in the next sections.
We conclude that our approach leads to optimizations with cache-aware cluster sizes and, hence, can lead to a memory bandwidth reduction for dynamically adaptive meshes.
We continue with strong-scaling benchmarks on shared-memory test platforms Intel and AMD (see Appendix A.2). On the Intel platform, the first 40 cores are the physical ones, followed by 40 cores which are the hyperthreaded ones. The simulations were initialized with a minimum refinement depth of 20. During the setup of the radial dam break, we use up to 8 additional refinement levels. We computed 100 time steps, leading to about 19 Mio. grid cells processed in average per time step. Tasking from TBB and OpenMP was used for the evaluation.
If not stated differently, we consider NUMA domain effects and try to avoid preemptive scheduling with context switches by pinning threads to computing cores. This is also referred as setting the thread affinities. We evaluated three different core-affinity strategies:
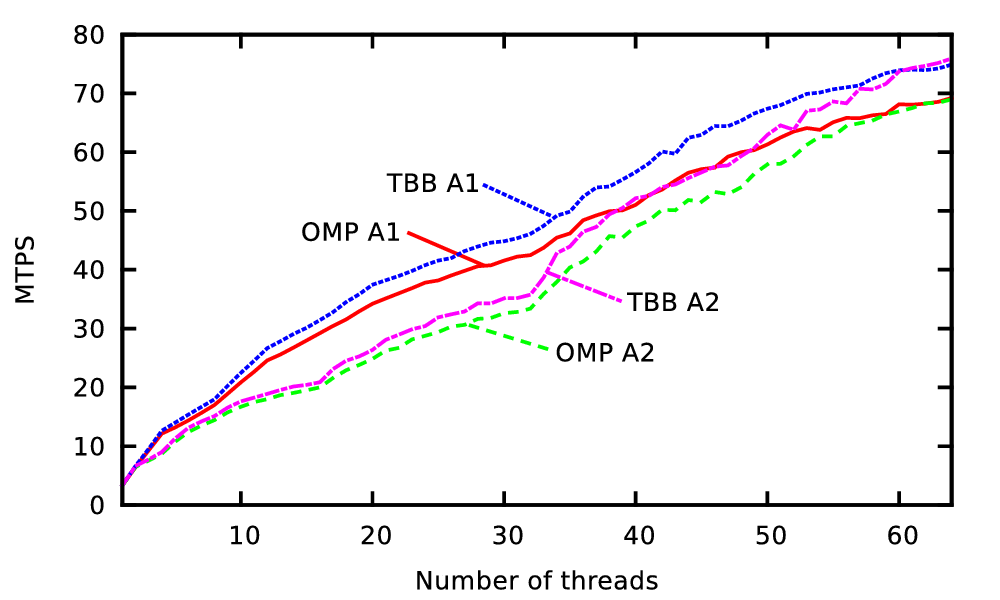
The results for the platform Intel and AMD are given in Fig. 5.25 and 5.26 and are discussed next.
With OpenMP, less scalability is gained in general for the considered test case. We created tasks with the untied clause for each cluster tree node. Due to known issues for OpenMP task constructs (see e.g. [OP09]), the scalability is not as good for unbalanced trees as by using TBB for parallelization.
We next consider different combinations for scheduling, determining which thread executes computations on which clusters (see Sec. 5.6.1) and how to dynamically generate clusters (see Sec 5.5). The benchmark scenario is based on a 2nd-order discretization in space and 1st-order discretization in time.
Regarding the scheduling stragtegies, we shortly recapitulate them in the following table:
| Scheduling | Description |
| Owner-compute | The clusters are assigned in a fixed way to the threads. No work stealing is possible. |
| Affinities | Only affinities are set, enqueuing tasks executed for a cluster to the worker queue of the owning thread. This still allows work stealing. |
| Task-flooding | No affinities are used. With current threading models TBB and OpenMP, this enqueues the task to the worker queue of the enqueuing thread. |
We also developed two different cluster-generation approaches shortly recapitulated in the next table:
| Cluster generation | Description |
| Threshold-based | The clusters are split or joined based on whether the local workload (cells) exceeds or undershoots the thresholds Ts or Tj. Thus, this is a local cluster generation criterion. |
| Load-balanced splitting | The clusters are split and joined based on the range information (see Sec. 5.6.2) and split in case that the cluster can be assigned to more than a single thread. This is a global cluster generation criterion. |
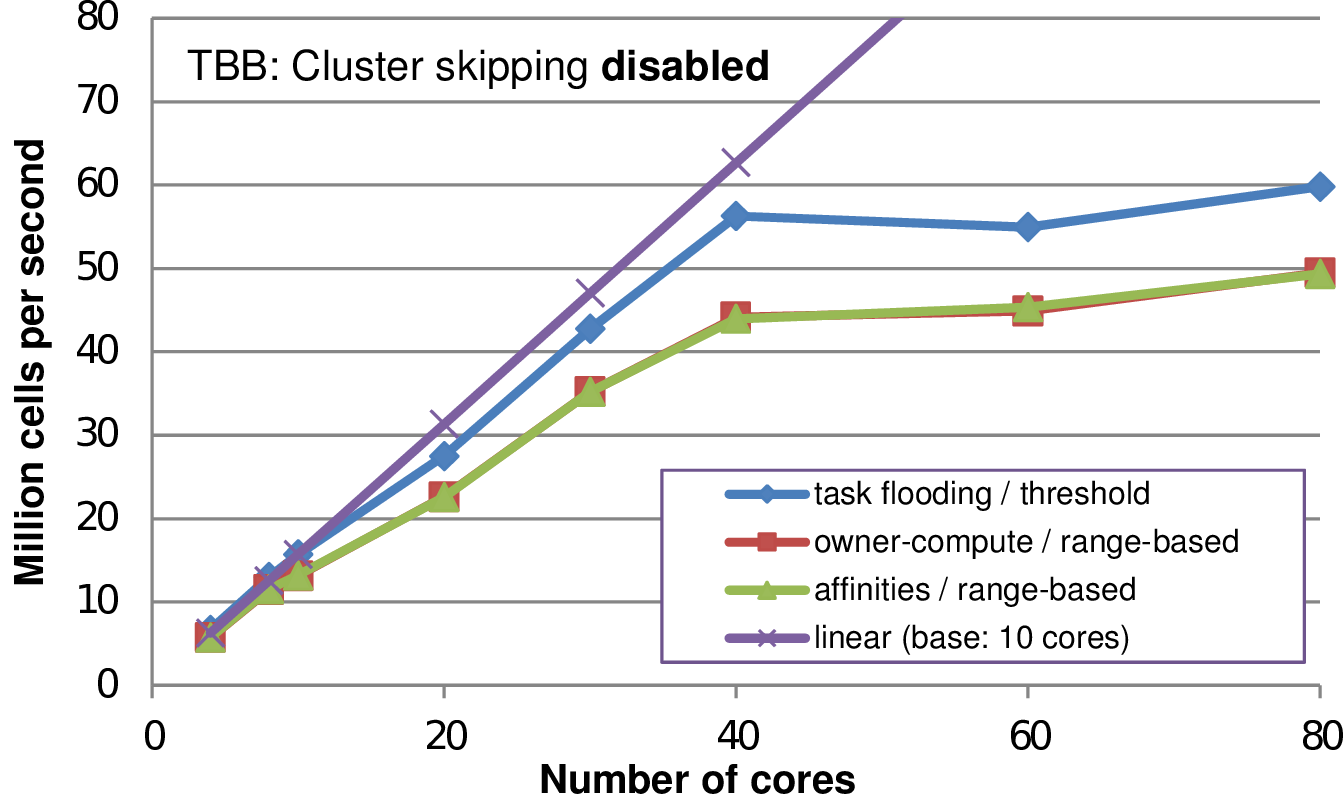
We conducted benchmarks with different combinations of the above mentioned scheduling and cluster generation strategies (See Fig. 5.27). Here we see that a cluster generation approach with range-based treesplits does not result in improvements as expected, but leads to less performance. We account for that by additional splits and joins compared to the pure threshold-based method. Such splits and joins of clusters result in additional overhead due to synchronizing updated meta information and additional memory access to split and join the cluster. Using a threshold-based cluster generation, by far less changes due to cluster splits and joins are required. This leads to improved performance for the threshold-based clustering.